给分拣机械拆上“眼睛”广州理工师生破解智能
|
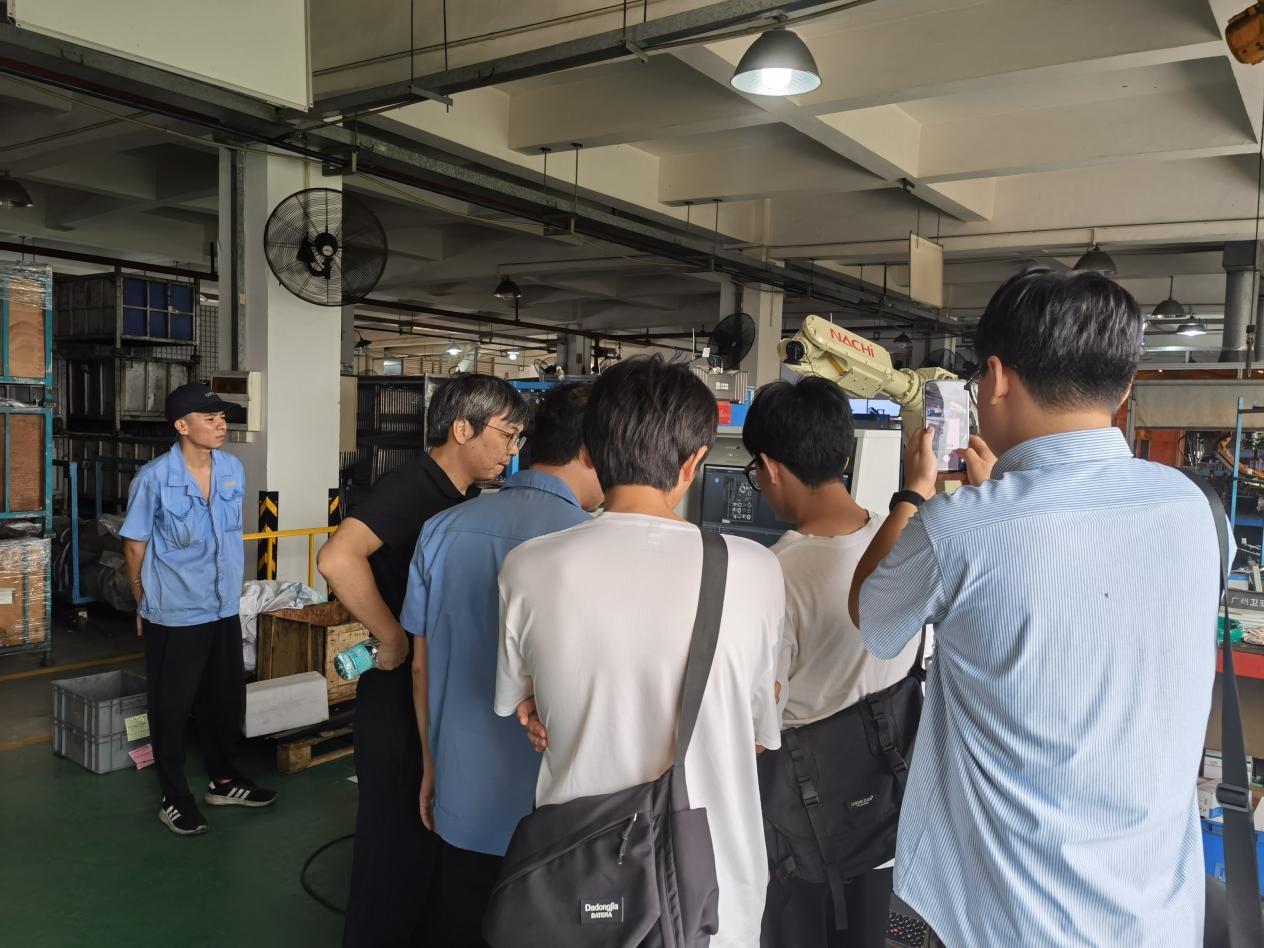
正在手艺对接过程中,师生团队取企业出产、研发部分构成结合工做组,精准锁定分拣环节三大痛点:保守机械臂难以应对无序堆叠物料、人工分拣效率波动大、多规格零部件混线分拣精度不脚。企业手艺从管正在结合手艺阐发会上坦言:“当前分拣线件零部件,已成为产能提拔的瓶颈。”。
团队担任人暗示,此次手艺攻关标记着高校立异资本取财产升级需求的深度融合。跟着该分拣系统即将接入企业智能工场全体打算,估计可为企业年节约人工成本300万元,出产线%。
针对这一行业共性难题,深瞳智选团队提出立异处理方案:“3D视觉识别+自顺应抓取系统”手艺架构。该方案冲破性地将3D布局光相机取深度进修算法连系,通过点云数据处置实现复杂场景下零部件的毫米级定位,共同自从研发的柔性夹爪节制系统,抓取成功率达99。2%。正在企业工程师的协做下,团队完成12类典型零部件的特征数据库建立,并正在企业试验线完成三轮手艺验证。
若何给分拣机械臂拆上“眼睛”?近期,张沛轩的率领下,由项目担任人李金花率队,取广州卫亚汽车零部件无限公司结合研发的“基于多模块协同的机械人3D方针识别无序分拣系统”通过企业验收。该项目成功实现工业级复杂场景下的智能分拣冲破,其焦点手艺已进入专利申报阶段,为粤港澳大湾区制制业智能化转型供给立异样本。
参取项目标学生感伤道:“正在调试3D视觉系统时,企业师傅教授的振动干扰应对经验,让我们认识到工业场景的复杂性。我们将讲堂上的卷积神经收集算法取现场工况连系,最终开辟出抗干扰加强模子。使研发兼具立异性取适用性。 |